Initially, my plan was to create a simple gimbal that would rotate the dual-cameras around the "origin", keeping them relatively fixed. As I continued with this train of thought, I realized that this is not how our eyes move relative to our heads. Our head moves relative to our neck, and our eyes are at a fixed distance from the "center" of our heads and a fixed height from our necks. If you look around now, you'll realize that our "origin of view" is not fixed as we sometimes imagine it to be. It moves in an arc at a fixed radius.
The real question to consider here is how much this difference in movement will affect comfort when using the camera. Abnormal movement might contribute to an "out of body" feeling, if our origin of view does not change as we turn our heads like we are used to. Depending on time and funds available, I hope to investigate both.
After some brief thought, I have come up with these three options....
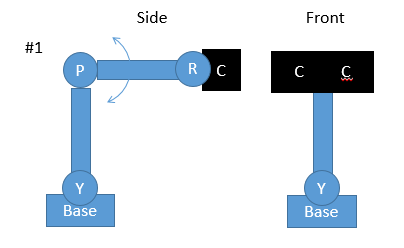


Camera Rig Sketches, P - Pitch servo, R - Roll servo, Y - Yaw servo
Option 1 was an original prototype for the "natural view" solution, rotation around the base, pitching from the center, and rolling at the cameras.
Option 2 gives the most realistic interpretation of the rotation about the neck, where the origin of pitch is not located below the eyes (close to where the neck should be). The angle of pitch, measured between the origin and point of cameras, is not in line with the direction of the cameras, which is more representative of how our eyes are oriented.
Option 3 is my original design, a simple horse shoe support to prevent vibration, wobble, or overshoot which would lead to discomfort. In this setup, the cameras revolve around the center, marked by the "R" or "Roll" servo.
Will update with more details to come, wanted to get this down as I thought about it!
No comments:
Post a Comment